國家智能制造裝備發展專項關鍵成套智能裝備研發成功
智能移動機器人是現代化車間物流系統的核心裝備,擁有巨大的市場空間。然而現有的移動機器人存在著機動靈活性差與定位導航精度低等問題,制約了移動機器人的發展。中國科學院寧波材料技術與工程研究所所屬二級所先進制造所精密運動與先進機器人團隊針對上述問題開展了深入的研究,近期開發出一套基于全向移動機器人的自動化車間物流系統,并成功應用于某大型國產汽車公司的發動機生產線搬運環節。
針對傳統移動機器人不能同時改變移動位置和方向、無法實現側行和斜行、機動靈活性不佳等問題,團隊設計開發出一種基于直驅電機并能實現解耦驅動的主動萬向腳輪。該萬向腳輪通過輸入運動耦合實現了輸出運動的解耦,即在腳輪的傳動系統中引入一個兩自由度的差速器,使得轉向電機可在輸出轉向運動的同時輸出一部分的滾動力矩,用于消除腳輪的轉向運動和滾動運動所產生的耦合運動,既簡化了運動控制,也避免了因耦合傳動而產生的腳輪磨損。
基于主動萬向腳輪,團隊研發了由多臺全向移動機器人組成的車間物流系統,并將其應用到了某汽車公司發動機生產線的搬運環節,其中每臺全向移動機器人均采用了模塊化的設計方法,通過模塊化并聯結構運動學動力學算法,實現了多個解耦式主動萬向腳輪的協調控制和純滾動條件下的0-360°轉向。單臺全向移動機器人依靠QR碼與視覺的多信息融合技術實現在車間物流場合的準確定位,并通過搭載的超聲波傳感器實現全方位自主避障,其承載能為250公斤,運動最大速度為1m/s,定位誤差小于20mm。該全向移動機器人系統通過安裝于上位機的統一調度算法,利用WIFI實現遠程的實時調度,除此之外,該系統可與臂式機器人組成車間物流搬運系統,實現車間貨物的全自動化取放和運輸。該車間物流系統是國家智能制造裝備發展專項“1.8TGDI 渦輪增壓發動機數字化智能制造車間應用示范”項目的關鍵成套智能裝備,可實現發動機的自動化搬運過程,替代了人工搬運,提高了物流效率。該項目近期通過了驗收,基于全向移動機器人的車間物流系統獲得了廠方認可和專家的好評。

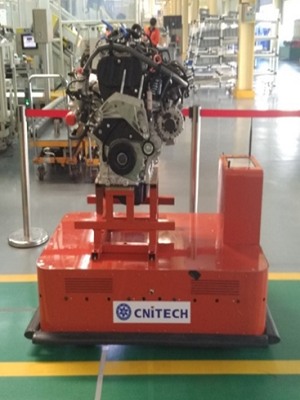
解耦式主動萬向腳輪 全向移動機器人平臺應用于汽車發動機搬運現場
標簽:全向移動機器人系統
相關資訊
2、如涉及作品內容、版權和其它問題,請在30日內與本網聯系,我們將在第一時間作出適當處理!有關作品版權事宜請聯系:+86-571-88970062